Professional Experience
My skillset is a testament to my commitment to robotics. These include immense interest in Perception for Mobile Robots, Manipulators, UAVs or developing Sensor Integration, SLAM, Autonomous Systems. I'm well-versed in programming languages such as Python and C++ and I have hands-on experience with essential technologies, perception systems and frameworks related to Robotics.
-

-
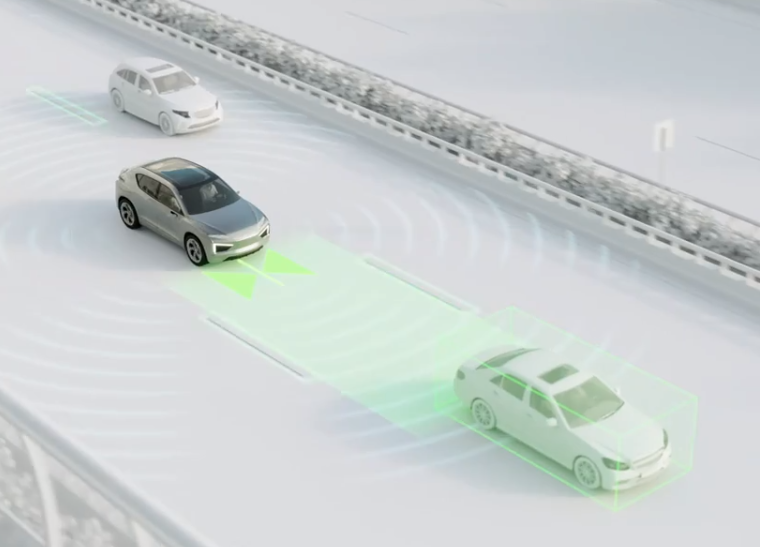 Camera_Radar_Fusion
Camera_Radar_Fusion
-
-
-
 Wheel_Pick_and_Place
Wheel_Pick_and_Place
-
 Wheel_Offset
Wheel_Offset
 Rectangle_Lug
Rectangle_Lug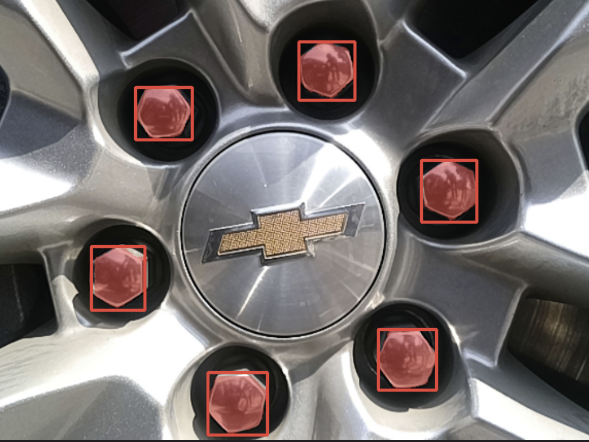 Hexagon_Lug
Hexagon_Lug -
-

 Thermal_Deblurring
Thermal_Deblurring Evaluation
Evaluation
-

-
 Simulation
Simulation
-
 Hardware
Hardware
-
 Hardware
Hardware
-
 Simulation
Simulation
-
-
-
 Hardware
Hardware
-
-

-
 Simulink
Simulink
-
 SimMechanics
SimMechanics
-