Course Projects and Experience
University of Michigan : Master of Science in Robotics - Ann, Arbor, USA
Courses : Mathematics for Robotics, Robotics Systems Lab, Mobile Robotics, Computer Vision, Robot Algorithms, Robot Manipulation.
BMS College of Engineering : Bachelor of Engineering in Electrical and Electronics - Bengaluru, India
Courses : Computer Vision, Machine Learning, Linear Algebra, Control Systems, Digital Signal Processing, Circuit Analysis
-

-
 Mapping_Recording
Mapping_Recording
-
 SLAM_Recording
SLAM_Recording
-
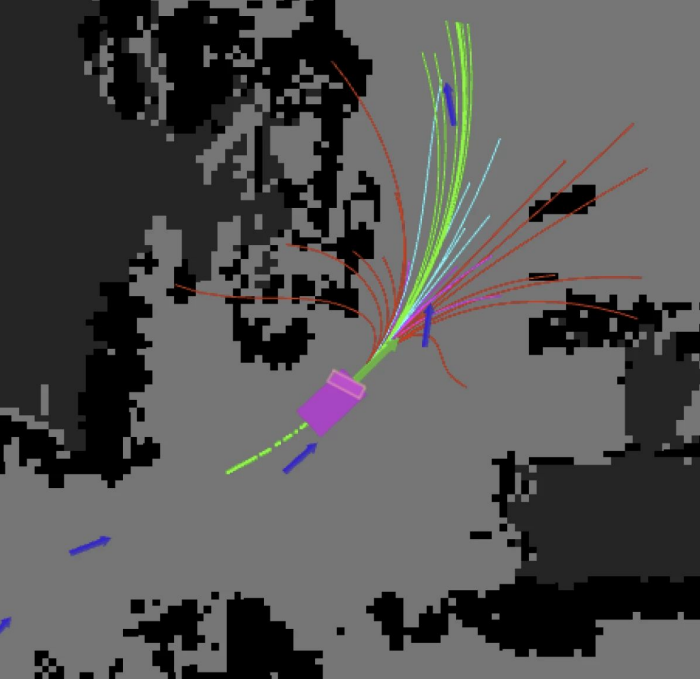
 A-star_Planner
A-star_Planner RRT_Planner
RRT_Planner Point_Cloud_Registration
Point_Cloud_Registration-
-
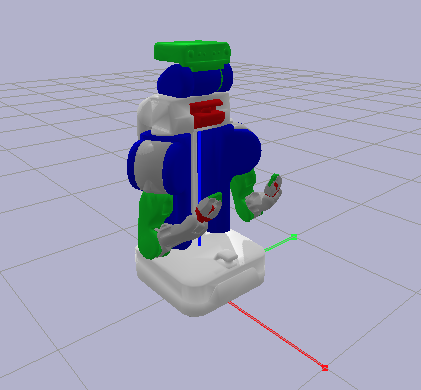
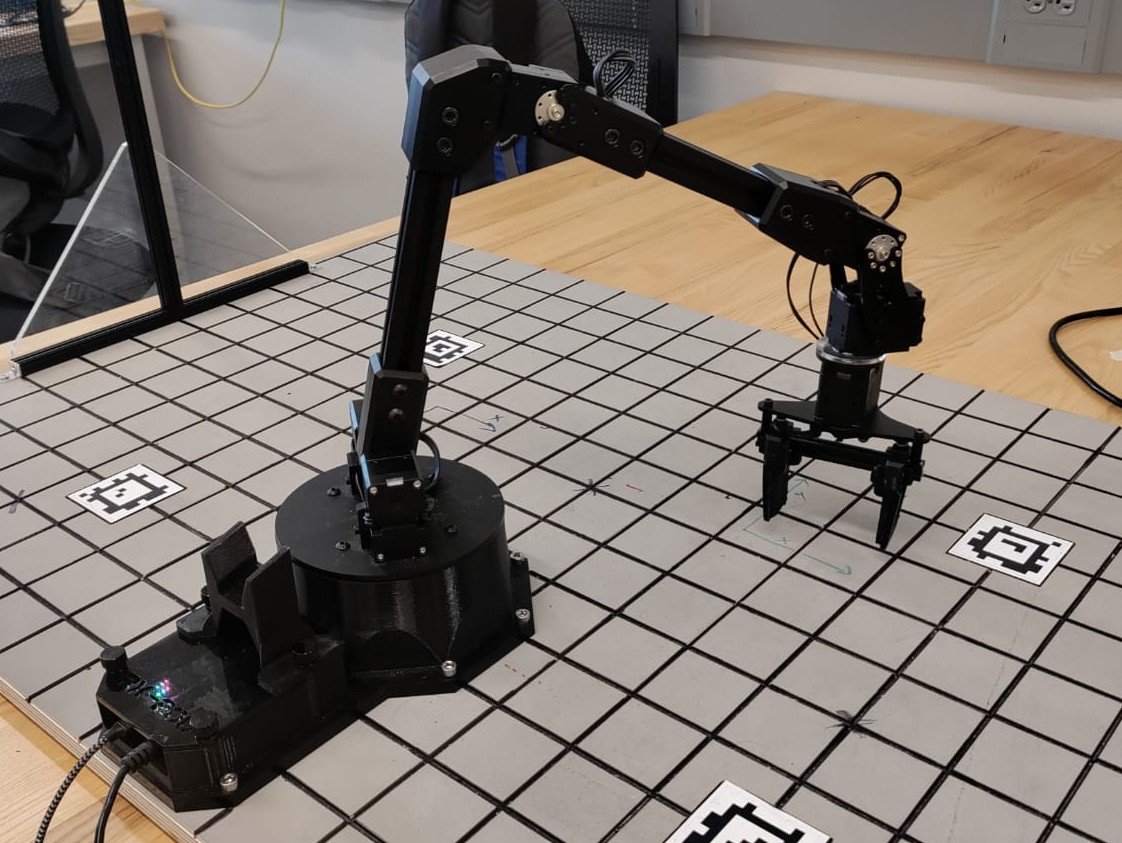
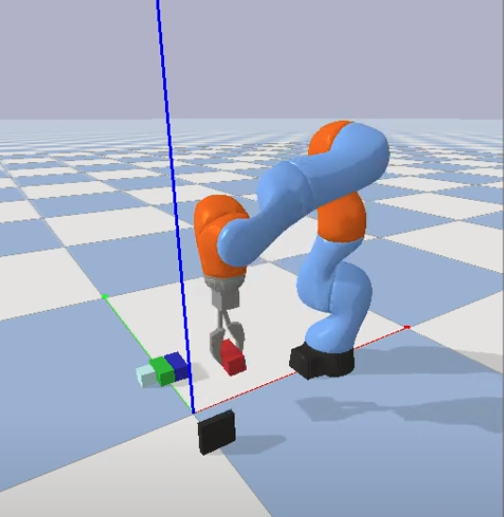
 Autonomous_Manipulation
Autonomous_Manipulation
 Kinematics
Kinematics Vision
Vision Stacking
Stacking-

-
 Autonomous_Navigation
Autonomous_Navigation
-

-
 Presentation
Presentation
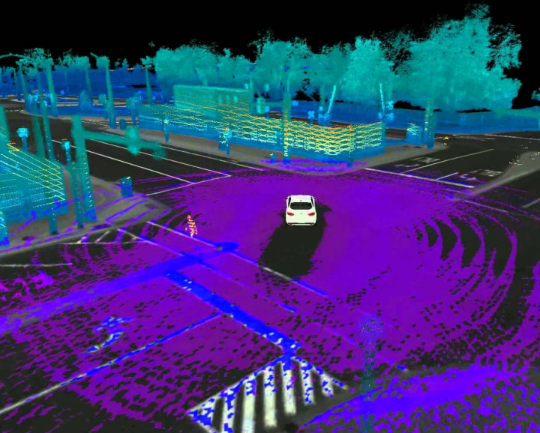
 Liosam_Pointcloud_Detection
Liosam_Pointcloud_Detection Dynamic_Feature_Removal
Dynamic_Feature_Removal Masked_Liosam_Birdeye
Masked_Liosam_Birdeye-
-
 Push_and_Grasp_Manipulator
Push_and_Grasp_Manipulator
-
-
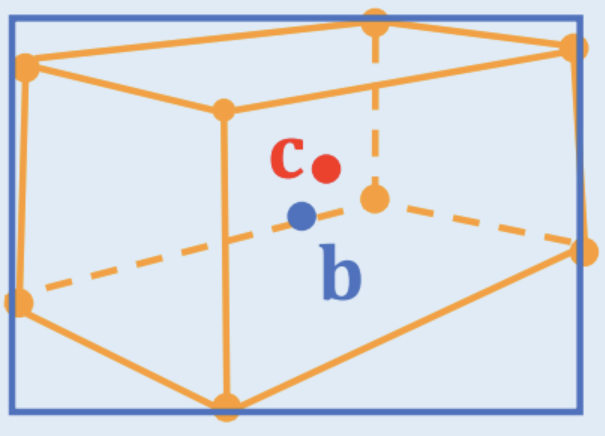
 2D_to_3D_Estimation
2D_to_3D_Estimation
-
-
-
-
-
-