Project Experience
I am passionate about exploring various robotic platforms and concepts, continually seeking to develop intriguing projects that align with my interests and aspirations. Through hands-on experience and a creative problem-solving mindset, I aim to make meaningful contributions that benefit society.
-

-
 Simulation
Simulation
-
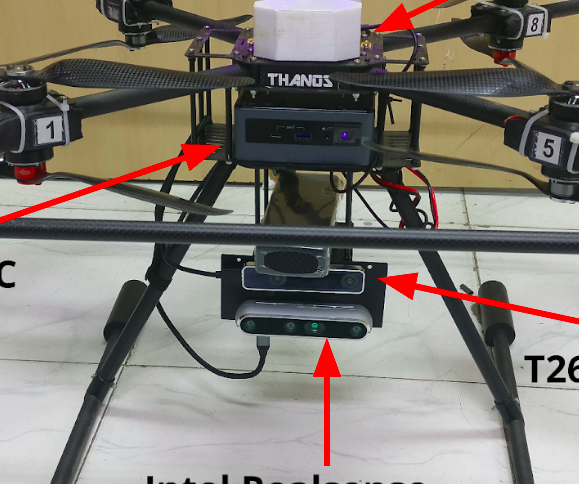
 Hardware
Hardware
-
-
-
 VIO_Mapping_and_Localization
VIO_Mapping_and_Localization
-
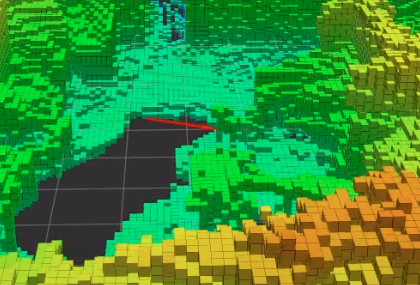
 Lidar_Mapping_and_Localization
Lidar_Mapping_and_Localization
-

-
 PuSHR_Perception
PuSHR_Perception
-

-
 xArm_Planning_and_Avoidance
xArm_Planning_and_Avoidance
-

-
 VIKRAM_Playlist
VIKRAM_Playlist
 Vikram_Design
Vikram_Design Vikram_Control
Vikram_Control Vikram_Manipulation
Vikram_Manipulation Vikram_Navigation
Vikram_Navigation-
-
 e_Yantra_Competition
e_Yantra_Competition
 Positon_Hold
Positon_Hold Follow_Line
Follow_Line Traverse_Bridges
Traverse_Bridges-
-
 Robotic_Arm_Imitation
Robotic_Arm_Imitation
-
-
-
-
-
-